When ships sail on the open ocean, they are subjected to a large number of forces in all directions. Be it wave loads, structural stresses, wind forces or even turning forces, these vessels must be built to withstand all such loads and stresses.
The first step in being able to counteract these loads is being able to understand the ship’s response to each of them.
If not carefully monitored, these loads might force the ship to travel in an unpredictable and dangerous manner contrary to the route of the vessel. Thus, it is important to understand and carefully analyse the various motions of a ship.
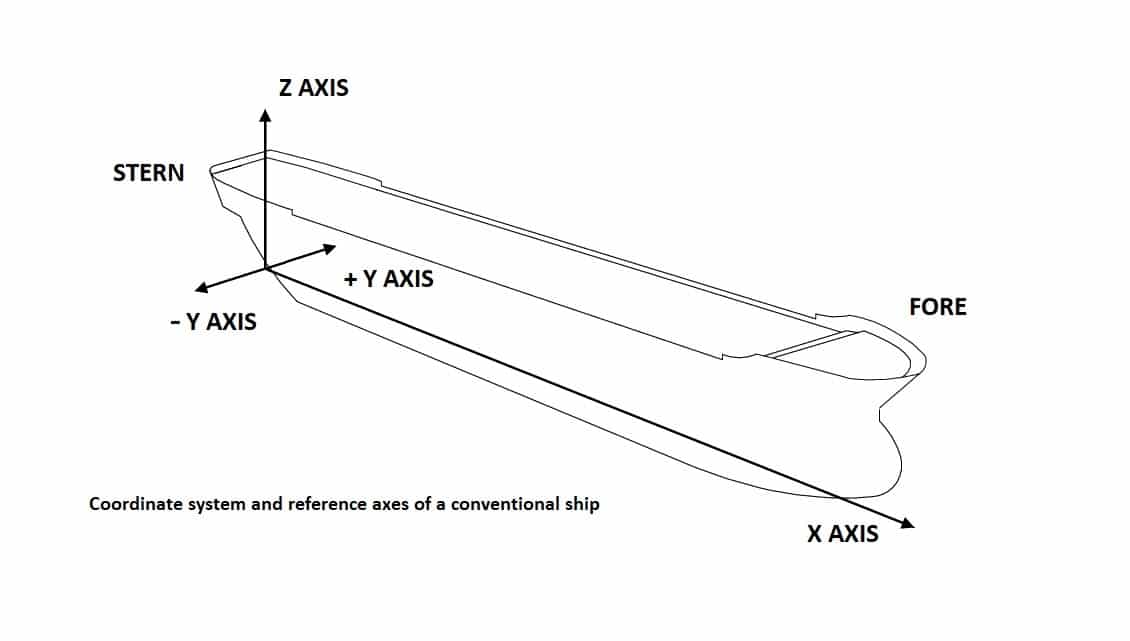
Coordinate System and Reference Axes
Pinpointing an exact location on a ship can be a tedious and difficult task. For this purpose, ships and vessels have a pre-determined coordinate system that is used.
The origin of the vessel lies at the point where the aft perpendicular and baseline intersects each other. The aft perpendicular is a vertical line running along the rudder stock of a vessel.
The rudder stock refers to the axis about which the rudder of a ship is able to rotate. The baseline refers to the lowermost structural member that forms the horizontal base of the ship. Both these lines are imaginary and merely serve as reference guidelines.
From this origin, the three axes are determined by the three dimensions of the ship.
The X-axis runs along the length from the stern towards the fore.
The Y-axis runs along the breadth or beam of the ship and is positive towards the port side.
Lastly, the Z-axis runs along the height of the vessel and is positive in an upward direction.
These three axes provide a clear definition of the various regions of the ship.
The Z-axis values usually never become negative as the vessel keel is supposed to be the bottom-most member.
Similarly, X-axis readings also never assume negative values, unless the vessel has been built with a cruiser stern that juts out beyond the rudder stock.
However, the Y-axis readings can be either positive or negative, depending on whether the position is on the port or starboard sides.
Positive values indicate port side locations, while negative values indicate starboard side locations. Thus, by using these coordinate axes, we can now move on to analysing the motions of a ship and their effects.
The Three Translational Ship Motions
A body that does not face restrictions in motion can have six degrees of freedom. A degree of freedom refers to the ability for the body to move freely in that particular motion.
These six freedoms are divided into two categories: three translational degrees, and three rotational degrees.
In this section, we will analyse the three translational degrees arising out of ship motions:
1. Heaving (Vertical translation – Z-axis)
2. Swaying (Transverse translation – Y-axis)
3. Surging (Longitudinal translation – X-axis)
Watch the video on 6 degrees of freedom:
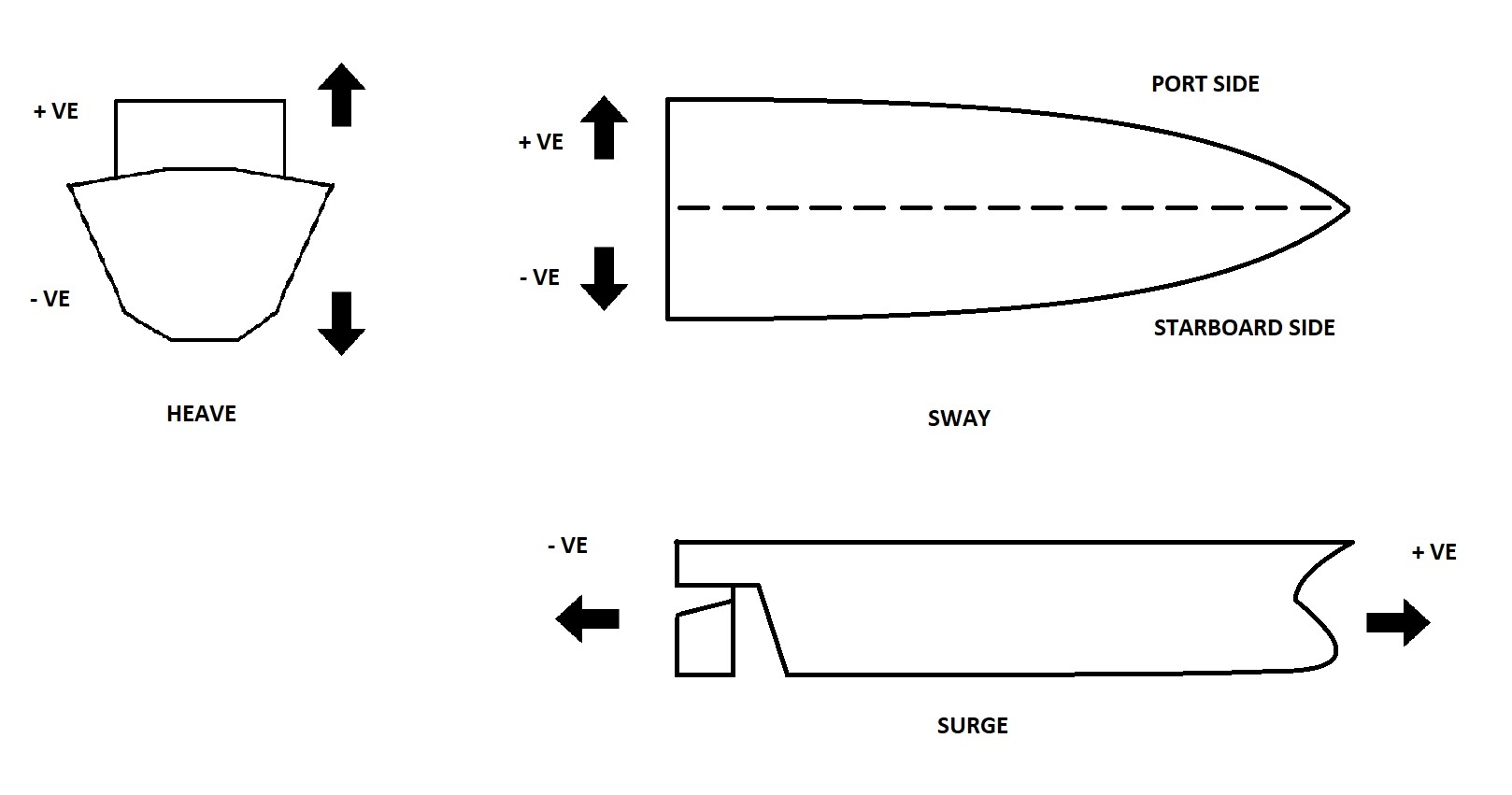
Translation refers to the motion of a body such that every point on it moves at the exact same speed. Along the three axes, we obtain motions known as heaving, swaying and surging.
The vertical motion is known as heaving. When waves strike a ship moving along its path of motion, it creates a difference in buoyancy and weight forces.
This tends to lift the ship up at certain section, as can be observed from the diagram.
This force imbalance results in an upward and downward motion commonly referred to as heaving.
The transverse motion is known as swaying. This occurs specifically when the ship is struck by waves moving perpendicular to the motion of the ship. It results in a motion that rocks the ship and tends to shifts the vessel between the port and starboard sides.
Unlike heaving, the force distribution is relatively uniform during this type of loading, and there are no uneven loads. This motion from side to side creates rapid acceleration and deceleration effects that can have damaging consequences on the vessel.
We will go into these effects in later sections.
Lastly, the longitudinal ship motion is known as surging. This arises due to the rapid acceleration and deceleration of the ship in a longitudinal direction that rocks the ship back and forth.
It is caused by waves striking the ship from either the fore or the stern, forcing it to momentarily surge either forward or backwards.
When combined with the motions of a ship, this type of motion can have severe structural implications on the integrity of the vessel.
The Three Rotational Ship Motions
In this section, we will analyse the three rotational degrees arising out of ship motions:
1. Yawing (Vertical rotation – Z-axis)
2. Rolling (Longitudinal rotation – X-axis)
3. Pitching (Transverse rotation – Y-axis)
Rotation refers to the motion of a body such that different points on it move at varying speeds depending on their position.
Along the three axes, we obtain motions known as yawing, rolling and pitching. These rotational motions arise out of force couples set up at different regions on the ship.
The rotation that occurs about the Z-axis that is vertically located is known as yawing. Yawing is, in general, less harmful than the other types of ship motions. It is brought about by a wave couple that acts perpendicular to the length of the ship. In general, it is impossible to keep a straight course when there are waves present, and there is always a small amount of yaw action on the ship.
However, with proper rudder corrections, it is possible to reduce the effects of yaw. This type of motion is common due to deflections in the rudder as well as oscillations set up by faulty steering equipment.
Rolling is the rotation occurring due to wave action, about a longitudinal axis, that is equivalent to an axis parallel to our earlier defined X-axis. This type of motion is often caused by waves moving perpendicular to the direction of motion of the ship.
It refers to a side-to-side rolling that is created when waves strike the side of the ship hull. Pitching is the rotation occurring about a transverse axis, equivalent to an axis parallel to the Y-axis. This action is common and results in an up and down motion of the fore and stern of the ship.
Longships tend to have smaller angles of pitch, often less than 5⁰, while shorter ships can experience pitching angles anywhere between 5⁰ to 8⁰. Usually, only the length plays a role in pitching characters, and not the other dimensions.
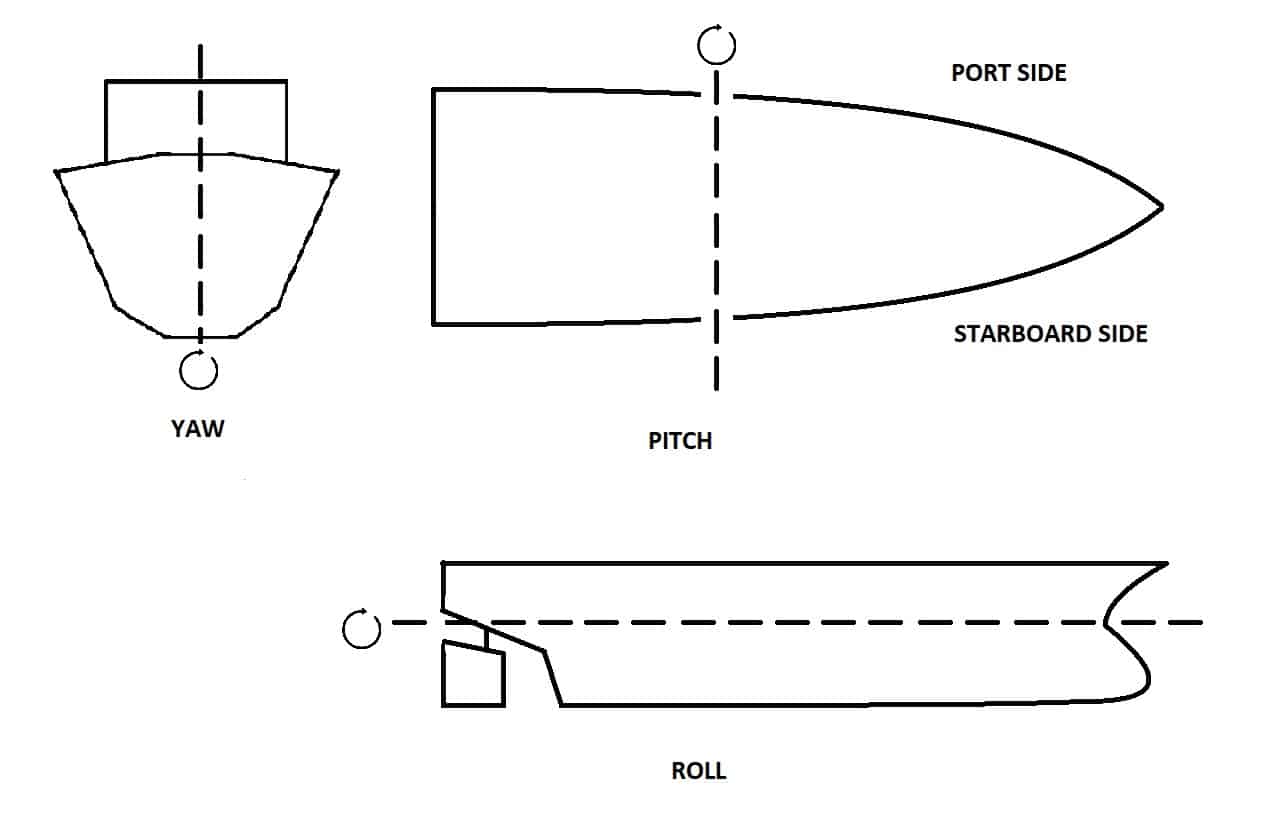
This type of motion is created by waves moving in the same direction as that of the ship. Pitching is often the most common type of ship motion that is rotational in nature and is prevalent in the open ocean and during poor weather conditions.
Effects of the Major Ship Motions
Ship motions can play a major role in the forces borne by the vessel and must be incorporated into calculations. There can be severe consequences on the stability, structural integrity and material responses due to these loads. In general, rotational motions do not drastically affect the behaviour and characteristics of the ship.
The ship is equipped to handle reasonable amounts of rotational loading as it is a centrifugal force. However, translational motion can be a major source of concern, as it results in large stresses being created in the hull of the ship. In addition, it can also adversely affect the machinery and cargo onboard the vessel.
For instance, during heaving and surging motions, there is a high chance that containers stacked onboard ships can come loose. This can cause damage and loss to property. While swaying is also capable of creating damage, it is less common as it requires waves to act in a certain manner.
Usually, when multiple types of motion act on the ship, it creates a twisting force known as torsion. This force is responsible for creating large stresses in the hull of the vessel and is most common in long container carriers.
When designing ships, it is essential that appropriate measures are taken to account for the various motions of the ship. It is also prudent to have these loads and their response on the ship tested using material analysis software.
The main factors that affect the motion of the ship and its response are the shape, size and weight of the ship. These factors determine other important parameters such as the centre of gravity, the centre of buoyancy and the beam at the waterline. These hydrostatic factors play a major role in determining how a ship or vessel behaves under certain loading conditions.
Hogging and Sagging
Now that we have covered the 6 main types of ship motions, we will discuss two common types of ship reactions to wave loads: hogging and sagging.
These phenomena refer to the curvature in the shape of the hull of the ship due to a force imbalance. During the various motions of the ship, there is sometimes a difference between the buoyancy and weight forces along the length of the ship.
Ideally, the weight and buoyancy should exactly match, at all points. However, due to waves, there is a high chance that at some points, the buoyancy value might change.
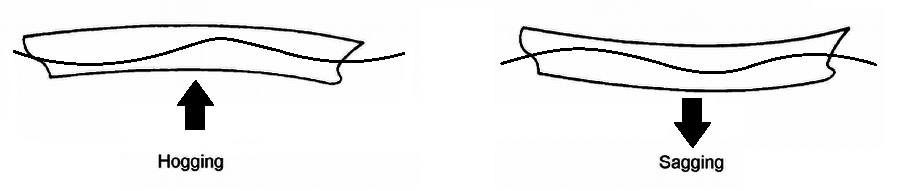
For instance, at the crest of waves, the buoyancy force is considerably higher, while it low at the trough. Thus, at the crest, that portion of the ship is pushed upwards, while the section at the trough is pushed downwards since its weight is not entirely supported.
Now, hogging is the condition in which the crest occurs at the midship section, while troughs occur on either side at the bow and stern. Thus, the ships flex in a manner concave to the surface of the wave.
On the other hand, sagging occurs when the trough is located in the midship section. Because of the crests at the other two ends, the vessel is forced to conform to a shape convex to the surface of the wave.
Due to the transitionary nature of wave forces, vessels often rapidly oscillate between the sagging and hogging conditions. This can set up a large vibration in the vessel that can cause damage.
Due to the flexural loads, there is a chance that prolonged exposure to such forces can cause material fatigue and compromise the structural integrity. The solution to this problem is the introduction of stiffened supporting members at the various sections of the ship so that loads can be borne and distributed evenly.
Bow Flare, Stern and Bottom Slamming
There is the 8th type of ship motion known as slamming.
Slamming refers to the sudden deceleration of a ship when it strikes the water’s surface.
This is generally caused by large shiploads that exert forces around three main parts of the ship: the bow flare, the stern and at the bottom.
The bow refers to the foremost part of the ship, and flare is a term used to identify how the ship’s beam increases from the waterline till the forecastle deck.
Ships with large flares are bound to encounter larger loading conditions due to their overall design and hydrodynamic behaviour. To counteract this, draft corrections are made such that flares can be used without causing damage to the ship’s hull.
Bow flare slamming occurs when the keel portion of the ship at the fore suddenly slams into the water. It occurs when the weights of the ship at the fore is not supported by buoyancy forces, and hence suddenly drops down.

Bow slamming is extremely common in the open ocean and exerts tremendous amounts of force on the ship. If not properly accounted for, it can be a major reason for structural failure at the fore.
To suitably reduce this type of slamming, reinforced sections are a must. These provide structural rigidity and help distribute loads evenly. In addition, by drastically increasing the draft, it is possible to reduce the amount of bow slamming. This type of slamming induces such a major load that it can result in almost irreparable and instant damage to the hull of the vessel.
Whenever calculations are computed regarding material strengths and structural properties, it is essential that bow slamming forces be incorporated into the load considerations. This is also the most common type of slamming, especially while away from the mainland where large waves exert enormous loads on the hull structure of a ship.
Stern slamming is similar to bow slamming, except that it occurs solely at the stern. It takes place when the weight at the stern is suddenly imbalanced by the lack of buoyancy forces.
As a result of the heavy engines, propellers and the rudder, this type of slamming can easily damage the aft portions of the ship if it occurs. The sudden deceleration is also a major reason for the weakening of both the rudder and the propellers.
Stern slamming is not as common as bow slamming, considering the shape and hydrodynamic characteristics of conventional ships. However, if not properly accounted for, it can result in structural faults and metal fatigue. It is important to properly reinforce the stern section, especially the overhang present on the transom and cruiser types of sterns.
The last type of ship motion is known as bottom slamming. This is less common, considering that it takes place when the keel area of a ship at the midship section slams into the water.
This can happen during the hogging and sagging loads that are common with weight and buoyancy imbalances. Under such conditions, the rest of the vessel may be temporarily supported on the water while the entire midship region is suspended.
This can create a large strain in the hull of the vessel, that can lead to permanent deformations and lasting damage. To prevent this sort of damage, the hull girder running along the length of the ship must be suitably reinforced with framing members and other load-distributing members.
In Conclusion
The motions of a ship created due to wave action can have lasting impacts on the hull and overall structure. It is important to carefully analyse the six main degrees of freedom (heaving, swaying, surging, yawing, rolling and pitching) as well as secondary loads such as hogging, sagging and the various types of slamming action.
To properly account for these forces, it is important to sufficiently strengthen the various components of the ship and to have additional support members. The main point to be kept in mind while designing structures capable of withstanding loads are that any force acting on the structure must be evenly distributed and not be left as point loads.
Point loads act only at a single location, and can often exceed the permitted amounts of strain. On the other hand, by spreading the force out among multiple structural components, it is possible to bring the overall loading to below the permissible value. Thus, with the right measures taken, it is possible to safeguard ships and vessels against the enormous loads created by the various motions of the ship.
 About
About
Comments
Post a Comment